
Weeder Arm
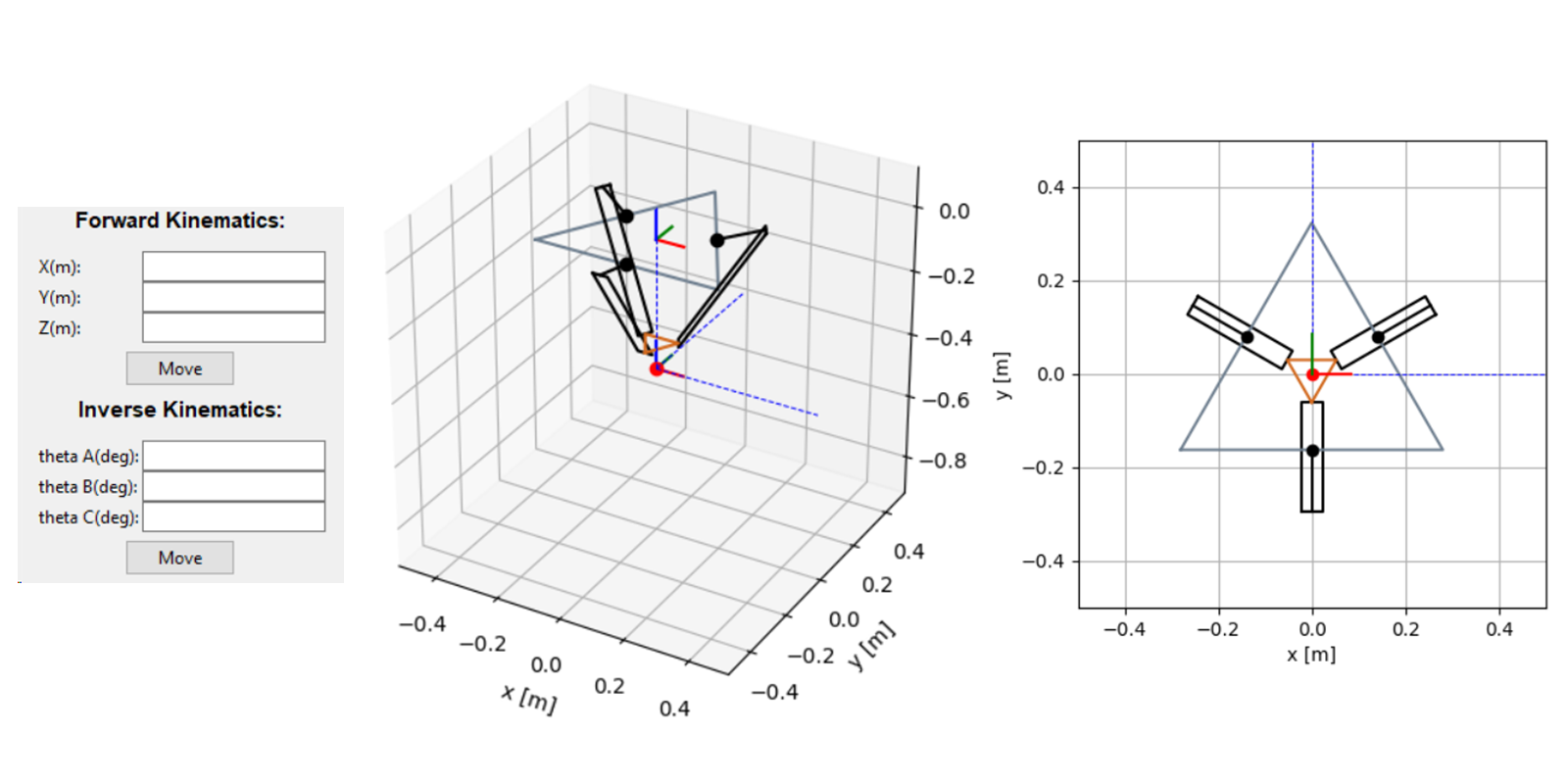
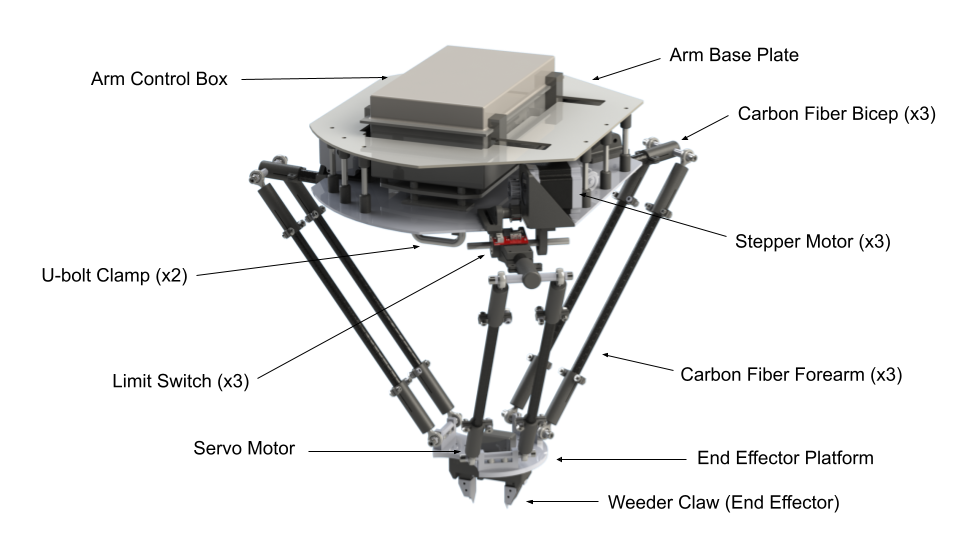
The mechanical weeder removes weeds identified by the plant identification system. To ensure both precision and efficiency, a delta arm was chosen due to its high-speed and precise operation. The delta manipulator comprises of a fixed base plate and a mobile end-effector platform connected by three link arms. Each arm consists of a bicep and a forearm, with biceps connected to the base via revolute joints. Three stepper motors spaced at 120° drive the biceps. The forearms are connected to the biceps and the end effector platform via spherical joints, ensuring parallel alignment with the base.