Crop Row Following
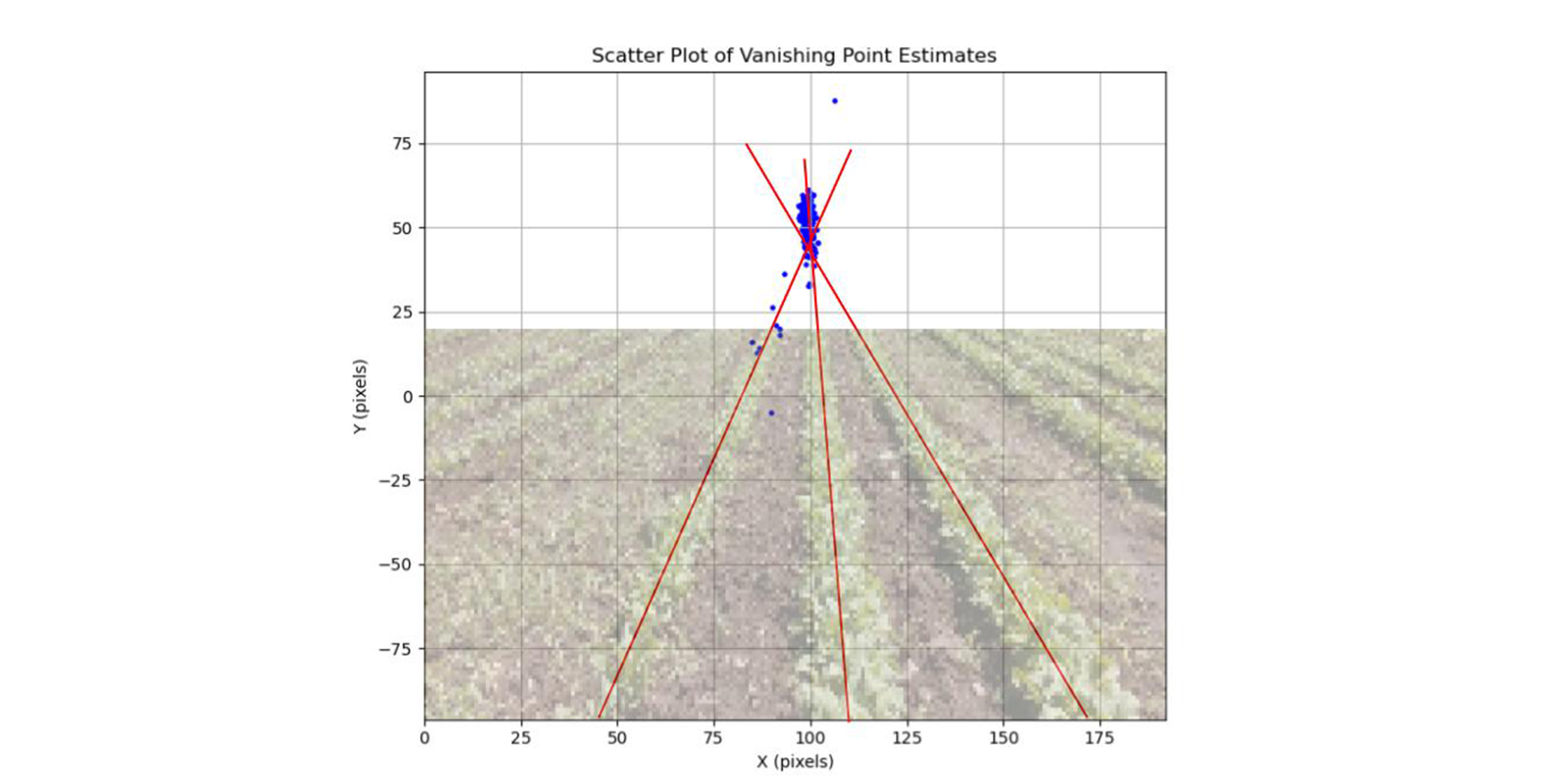
The robot uses an Intel Realsense camera and OpenCV to maintain a straight path down a crop row. It isolates plants using HSV thresholding to mask non-green pixels, then crops the image to reduce error and computation time. Crop row lines are determined by analyzing green pixel ratios and smoothing peaks to identify rows. Assuming three crop rows, the system tries to minimize squared distances to the lines and calculates the vanishing point, which sets the robot's heading angle. A PID controller converts this angle into angular velocity, adjusting the linear velocity proportionally to ensure precise navigation.