Aerialbot Hardware Architecture
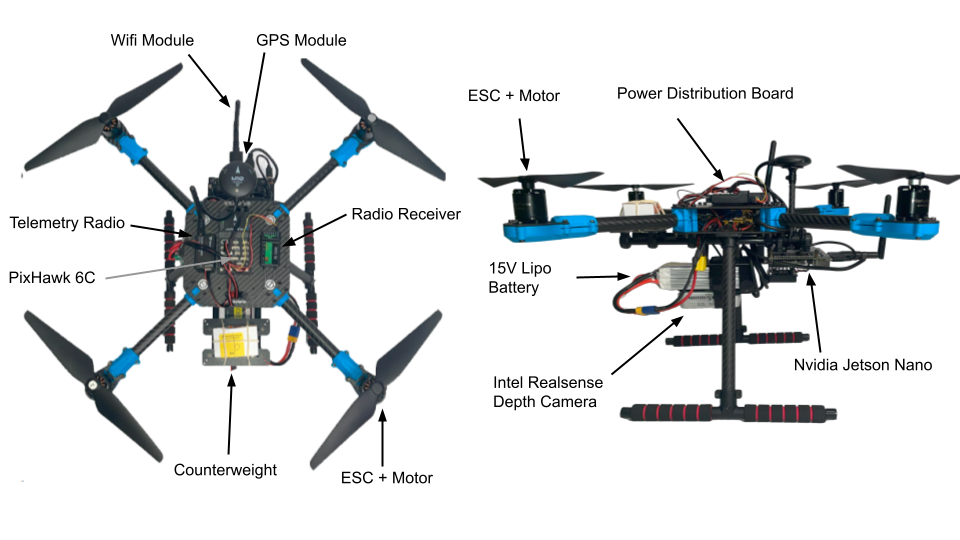
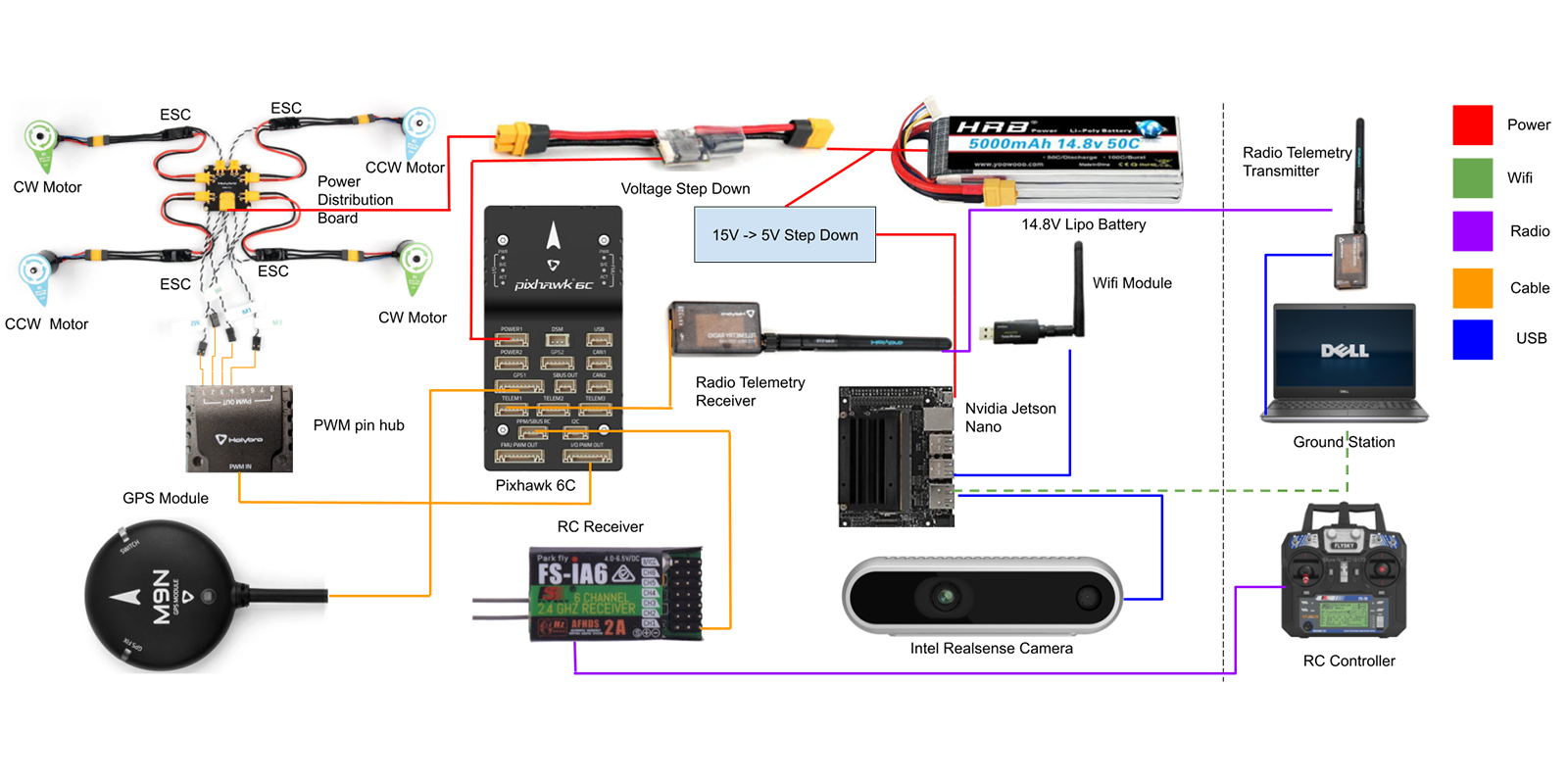
This drone system is built around a Pixhawk 6C flight controller, with power distributed from a Li-Po battery to the motors via ESCs. It integrates a GPS module for navigation, telemetry for ground control communication, and a companion computer with a depth camera for advanced navigation. This setup enables both remote and autonomous operation, combining manual control through a FlySky transmitter with real-time data processing for enhanced autonomy.